طراحی کنترل کننده بهینه چهار ربعی خطی برای روبات دوچرخه
پروژه ۳۱۸: شبیه سازی مقاله در متلب + توضیحات اجرا
Design of Linear Quadratic Optimal Controller for Bicycle Robot
Proceedings of the IEEE
International Conference on Automation and Logistics Shenyang, China
*****************************
دانلود: دانلود اصل مقاله لاتین
*****************************
چکیده :
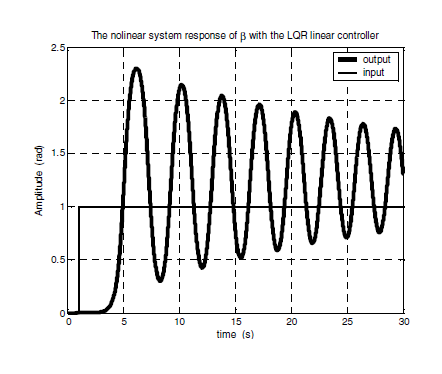
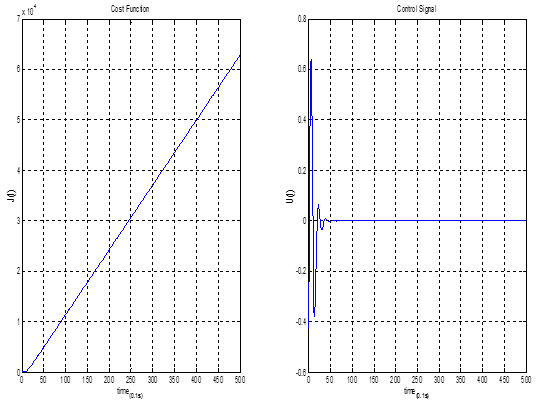
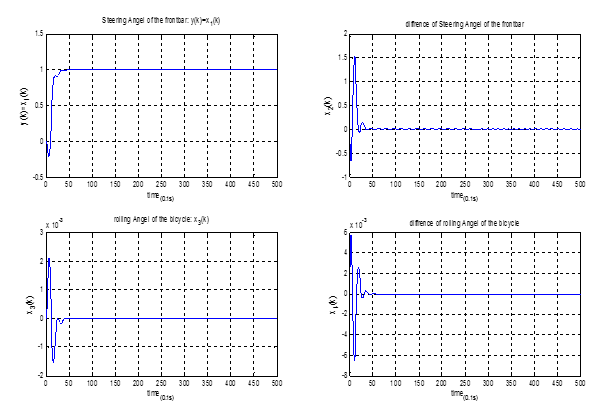
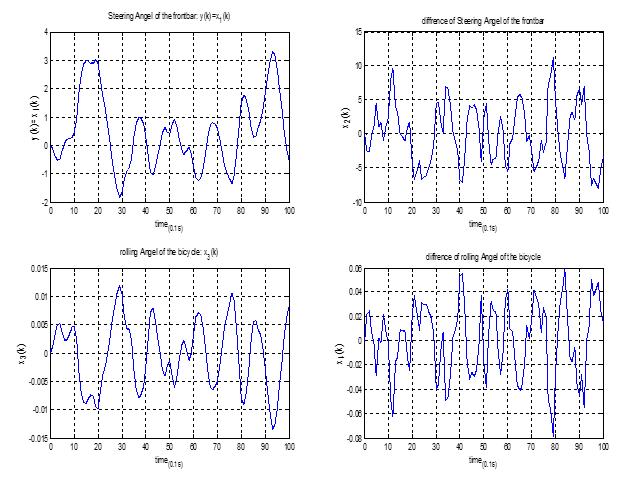
مدل دینامیکی روبات دوچرخه به مشابه مدل خطی است که آن در حال حرکت با سرعت بالاست. هدف اصلی این شبیه سازی بالانس تعادل دوچرخه در سرعت های بالاست. این مساله بسته به مدل غیر خطی روبات دوچرخه دارد. پایداری حلقه باز سیستم روی مدل خطی مورد آنالیز قرار گرفته است. سیستم شبیه سازی در فضای پیوسته تحلیل شده است. در این شبیه سازی مدل چهار ربعی ربات دوچرخه براساس تئوری کنترل و مدل دینامیکی دوچرخه طراحی شده است. نتایج شبیه سازی کامپیوتری نیز نشان از بهبود راندمان الگوریتم کنترل می باشد. برای توضیحات بیشتر اصل مقاله را از لینک فوق دریافت نمایید.
برخی نتایج :
در صورت سوال در مورد محصول می توانید از بخش تماس با ما (منوی بالا)، با شماره تلفن مورد نظر مکاتبه نمایید.
برای عضویت در کانال ما روی عکس زیر کلیک کنید : (آخرین اخبار مرتبط با مهندسی و سایر تکنولوژی ها)

یا آدرس لینک زیر را در تلگرام خود جستجو نمایید:
m_b_coll@