سفارش پروژه
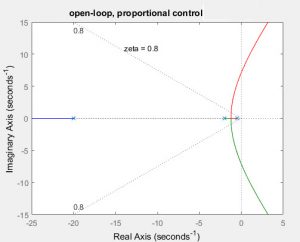
پروژه۱۰۵۸: سورس کامل متلب + شبیه سازی کامل در این شبیه سازی به بررسی دقیق طراحی کنترل کننده PI ،…
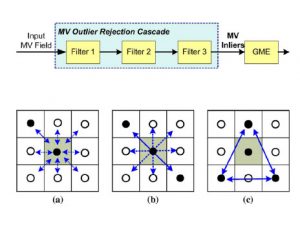
پروژه۱۶۲۹: شبیه سازی مقاله isi در متلب + سورس کامل متلب + توضیحات خطوط برنامه عنوان مقاله: Motion Vector Outlier Rejection…