کنترل پذیری و کاهش رویت پذیری در متلب + کدهای کامل در متلب
پروزه ۱۰۱۳: شبیه سازی در ام فایل متلب
سیستم زیر را در نظر بگیرید؟
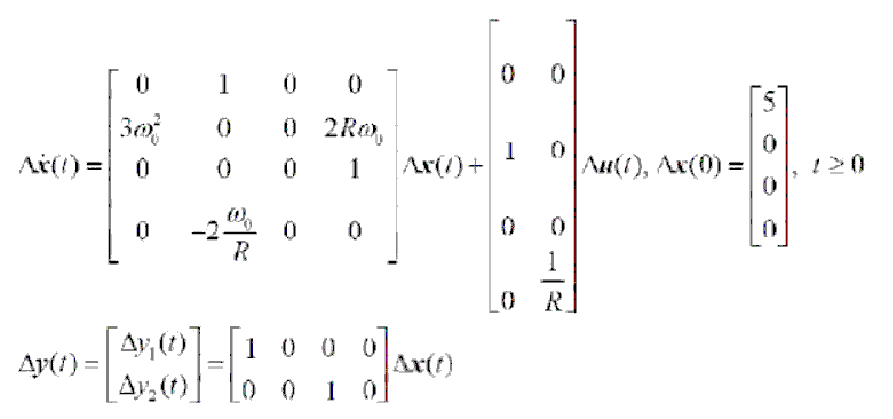
الف: آیا سیستم فوق برای مقادیر R=10m و W0=1rad/s کنترل پذیر است؟
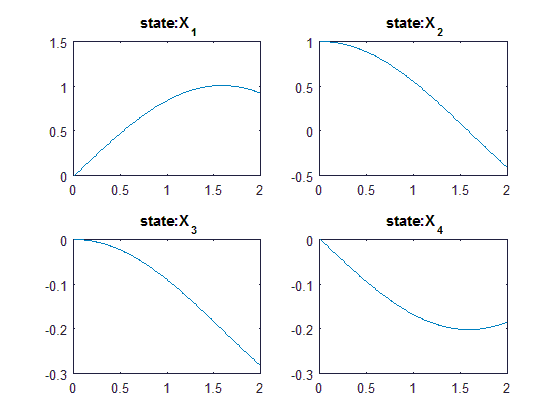
ب: یک رویت گر کاهش مرتبه برای این سیستم در ۲ ثانیه طراحی نمایید؟
در صورت سوال در مورد محصول می توانید از بخش تماس با ما (منوی بالا)، با شماره تلفن مورد نظر مکاتبه نمایید .
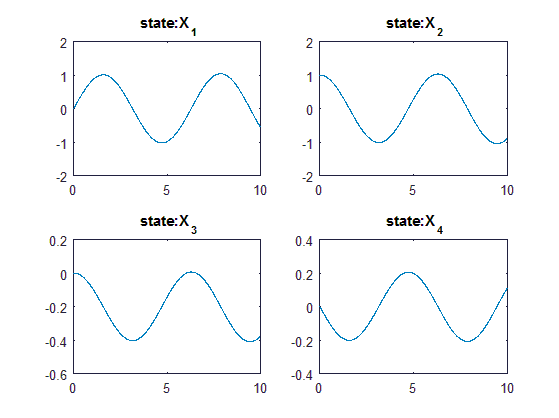
برخی نتایج:
A =
۰ ۱٫۰۰۰۰ ۰ ۰
۳٫۰۰۰۰ ۰ ۰ ۲۰٫۰۰۰۰
۰ ۰ ۰ ۱٫۰۰۰۰
۰ -۰٫۲۰۰۰ ۰ ۰
B =
۰ ۰
۱٫۰۰۰۰ ۰
۰ ۰
۰ ۰٫۱۰۰۰
controlability_rank =
۴
K =
۶٫۰۰۳۸ ۴٫۰۰۱۷ ۰٫۱۵۸۳ ۲۰٫۰۶۳۵
۱٫۲۱۱۵ -۱٫۴۸۰۲ ۷۹٫۹۶۱۵ ۵۹٫۹۸۳۵
prec =
۱۴
o1 =
۳
o2 =
۴
A11_taw =
۰ ۰
۱ ۰
A12_taw =
۰ -۰٫۲۰۰۰
۰ ۰
A21_taw =
۰ ۰
۲۰ ۰
A22_taw =
۰ ۱
۳ ۰
برای عضویت در کانال ما روی عکس زیر کلیک کنید : (آخرین اخبار مرتبط با مهندسی و سایر تکنولوژی ها)

یا آدرس لینک زیر را در تلگرام خود جستجو نمایید:
m_b_coll@
مجموعه: کنترل