کاربرد منطق فازی در کنترل کامیون باری + پروژه ای کامل برگرفته از کتاب تشنه لب
پروژه ۵۰۲: کاربرد منطق فازی در کنترل کامیون باری
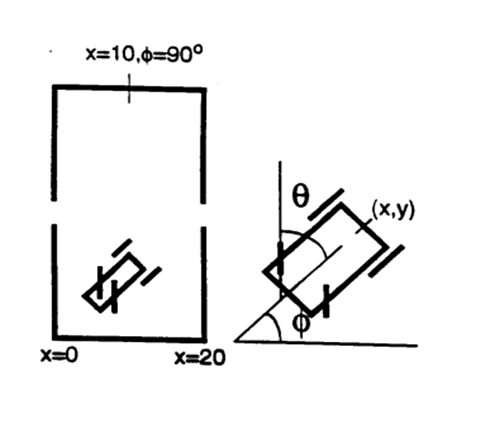
حرکت رو به عقب کامیون در یک بارانداز برای حمل بار یک مساله کنترل غیر خطی است. شکل کامیون و ناحیه بارگیری در شکل فوق نشان داده شده است.
مکان کامیون بوسیله سه متغیر (φ, x, y) تعیین می شود جاییکه φ زاویه کامیون نسبت محور افق می باشد. کنترل کامیون از طریق زاویه فرمان θصورت می گیرد.فقط حرکت رو به عقب مجاز است.کامیون در هر مرحله با یک تغییر مکان ثابت عقب می رود. برای سادگی فرض شده که فضای کافی بین کامیون و محل بارگیری وجود دارد به نحوی که لازم نیست y را به عنوان یک متغیر حالت در نظر بگیریم. هدف طراحی کنترل کننده این است که ورودی های آن (φ, x) و خروجی آن θبوده به نحوی کهحالت نهایی x=10 و φ=۹۰ درجه باشد. (xf, φf) = [10,90o].
این شبیه سازی مربوط به کتاب منطق فازی تشنه لب و در ام فایل متلب انجام شده است. همچنین یک فایل توضیحات وورد و چگونگی اجرای برنامه ضمیمه برنامه گردیده است. در صورت سوال در مورد محصول می توانید از بخش تماس با ما (منوی بالا)، با شماره تلفن مورد نظر مکاتبه نمایید.
مجموعه: منطق فازی, مهندسی کامپیوتر