محاسبه فضای حالت در فرم مدال و فرم phase-variable
پروژه ۱۰۹۰: شبیه سازی کامل در متلب (ام فایل)
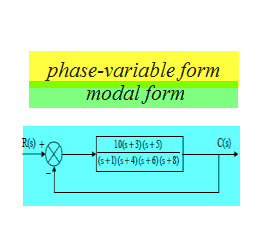
در این پروژه به بررسی دقیق محاسبه فضای حالت در فرم مدال و فرم phase-variable در متلب پرداخته شده است. سیستم مورد بررسی در شکل زیر قابل مشاده است.

در صورت سوال در مورد محصول می توانید از بخش تماس با ما (منوی بالا)، با شماره تلفن مورد نظر مکاتبه نمایید.
برخی نتایج:
G =
۱۰ (s+3) (s+5)
———————–
(s+1) (s+4) (s+6) (s+8)
Continuous-time zero/pole/gain model.
T =
۱۰ (s+3) (s+5)
—————————————–
(s+1.69) (s+4.425) (s^2 + 12.88s + 45.73)
Continuous-time zero/pole/gain model.
AC =
-۱۹٫۰۰۰۰ -۱۳۲٫۰۰۰۰ -۳۷۶٫۰۰۰۰ -۳۴۲٫۰۰۰۰
۱٫۰۰۰۰ ۰ ۰ ۰
۰ ۱٫۰۰۰۰ ۰ ۰
۰ ۰ ۱٫۰۰۰۰ ۰
BC =
۱
۰
۰
۰
CC =
۰ ۱۰ ۸۰ ۱۵۰
DC =
۰
Apv =
۰ ۱٫۰۰۰۰ ۰ ۰
۰ ۰ ۱٫۰۰۰۰ ۰
۰ ۰ ۰ ۱٫۰۰۰۰
-۳۴۲٫۰۰۰۰ -۳۷۶٫۰۰۰۰ -۱۳۲٫۰۰۰۰ -۱۹٫۰۰۰۰
Bpv =
۰
۰
۰
۱
Cpv =
۱۵۰ ۸۰ ۱۰ ۰
G =
۱۰ (s+3) (s+5)
———————–
(s+1) (s+4) (s+6) (s+8)
Continuous-time zero/pole/gain model.
T =
۱۰ (s+3) (s+5)
—————————————–
(s+1.69) (s+4.425) (s^2 + 12.88s + 45.73)
Continuous-time zero/pole/gain model.
AC =
-۱۹٫۰۰۰۰ -۱۳۲٫۰۰۰۰ -۳۷۶٫۰۰۰۰ -۳۴۲٫۰۰۰۰
۱٫۰۰۰۰ ۰ ۰ ۰
۰ ۱٫۰۰۰۰ ۰ ۰
۰ ۰ ۱٫۰۰۰۰ ۰
BC =
۱
۰
۰
۰
CC =
۰ ۱۰ ۸۰ ۱۵۰
DC =
۰
A =
-۶٫۴۴۲۵ ۲٫۰۵۵۱ ۰ ۰
-۲٫۰۵۵۱ -۶٫۴۴۲۵ ۰ ۰
۰ ۰ -۴٫۴۲۴۹ ۰
۰ ۰ ۰ -۱٫۶۹۰۲
B =
-۳۴٫۴۶۵۷
-۴۷٫۳۱۸۳
۳۹٫۶۵۲۶
۴٫۷۴۰۷
C =
-۰٫۰۳۳۸ ۰٫۰۴۴۸ ۰٫۰۰۹۱ ۰٫۱۲۴۷
D =
۰

دیگر پروژه مرتبط:
تخمین فضای حالت بهینه Optimal State Estimation در متلب – یک مدل ساده
مجموعه: کنترل