شبیه سازی کامل یک پروژه با فیلتر کالمن در متلب + آموزش
پروژه ۱۰۶۹: شبیه سازی در متلب + سورس کامل متلب + توضیحات خط به خط دستورات+ فیلم آموزش و همچنین اجرای کد
خلاصه ای از کار:
در این پروژه قصد داریم تا یک شبیه سازی کامل در مورد فیلتر کالمن در متلب انجام دهیم. حدالامکان سعی شده پروژه طوری طراحی گردد که برای هر ساختار مرتبط دیگر نیز جواب گو باشد. این پروژه ساده ترین و در کنار آن حرفه ای ترین شبیه سازی برای فراگیری و تمرکز روی شبیه سازی مرتبط با فیلتر کالمن می باشد. همانطور که از نتایج در ادامه می بینیم سیستم پیشنهادی بسیار عالی در تخمین حرکت وسیله نقلیه رفتار کرده است.
مقدمه ای بر فیلتر کالمن:
این فیلتر معمولاً تخمین دقیقتری را نسبت به تخمین بر مبنای یک اندازهگیری واحد و تخمین توزیع احتمال مشترکی از یک متغیر تصادفی در یک مقطع زمانی ارائه میکند. این فیلتر از نام رودولف کالمن ، یکی از پایهگذاران این تئوری گرفته شدهاست. فیلتر کالمن کاربردهای بسیاری در علم و فناوری مانند مسیریابی و پایش وسایل نقلیه، به خصوص هواپیما و فضاپیماها، دارد. فیلتر کالمن مفاهیم گستردهای را در زمینه سریهای زمانی، پردازش سیگنال و اقتصادسنجی مطرح میکند. این فیلتر از مفاهیم پایه در زمینه برنامهریزی و پایش رباتها و همچنین مدلسازی سیستم عصبی محسوب میشود. بر اساس تأخیر زمانی میان ارسال فرامین و دریافت پاسخ آنها، استفاده از فیلتر کالمن در تخمین حالات مختلف سیستم را ممکن میسازد.
مشخصات:
مشخصات: مبتنی بر مدل ، خطی بودن مدل ، سفید و گوسی بودن نویزها . اما اکنون استفاده از این فیلتر به سیستمهای غیرخطی ، با دینامیک متغیر و شرایط دیگر نویزها، توسعه پیدا کرده است.
الگوریتم کاری :
معادله حالت و خروجی برابر با :

سرعت در این حالت برابر با:

T برابر با زمان ممکن. اگر چنانچه یک نویز هم به سیستم اضافه شود داریم:

سرعت نویز با ~vk نشان داده شده است. در این حالت رابطه موقعیت نیز بصورت زیر نوشته می شود.
![]()
در فرمول فوق جمله pk~ نویز موقعیت پی می باشد. به این ترتیب X و معادله فضای حالت سیستم کلی بصورت زیر تعریف می گردد.

طبق تئوری کالمن داریم: (کواریانس نویز و …)

در صورت سوال در مورد محصول و یا در صورت اشکال در اجرای شبیه سازی می توانید از بخش تماس با ما (منوی بالا)، با شماره تلفن مورد نظر مکاتبه نمایید.
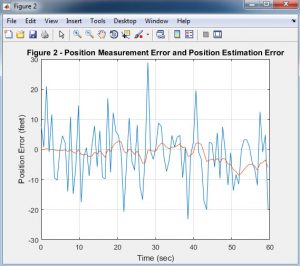
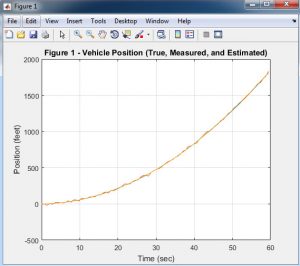
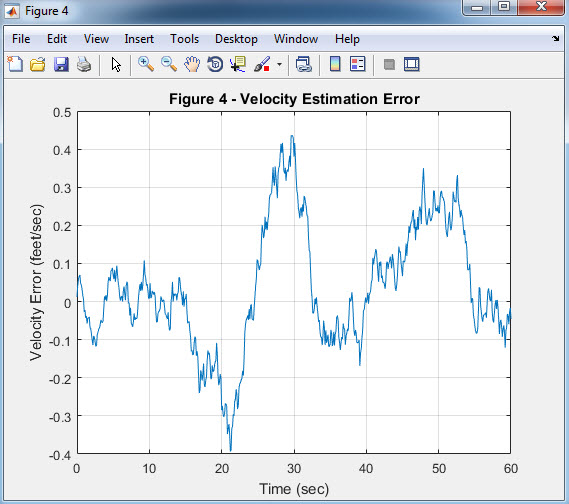
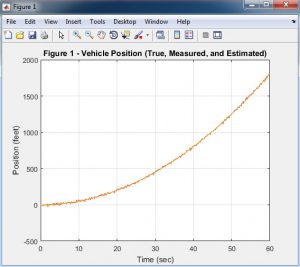
برخی نتایج:
این شبیه سازی را اختصاص داده ایم به تخمین حرکت یک وسیله نقلیه در عرض یک جاده.
برای step size برابر با ۰٫۱



برای step size برابر با ۰٫۷