
شبیه سازی کامل متلب: نظریه ماشینهای DC بی جاروبک الکتریکی
پروژه ۲۳۲: شبیه سازی در ام فایل متلب + توضیحات همراه با معادلات + مشاوره رایگان
خلاصه ای از کار:
موتور dc بی جاروبک به عنوان یک موتور کنترل توان کم به طور گسترده ای به کار می رود این سیستم دارای ظاهر فیزیکی شبیه یک ماشین سنکرون سه فاز مغناطیس دائم است.
این ماشین عموماً از یک اینورتر شش پالسه تغذیه می شود که یک ولتاژ ثابت را به ولتاژهای سه فاز با فرکانس متناظر با سرعت لحظه ای روتور تبدیل می کند.
ترکیب اینورتر-ماشین دارای مشخصه های پایانه و خروجی شبیه به موتور dc شنت است، به همین علت آنرا موتور dcبی جاروبک می نامند.
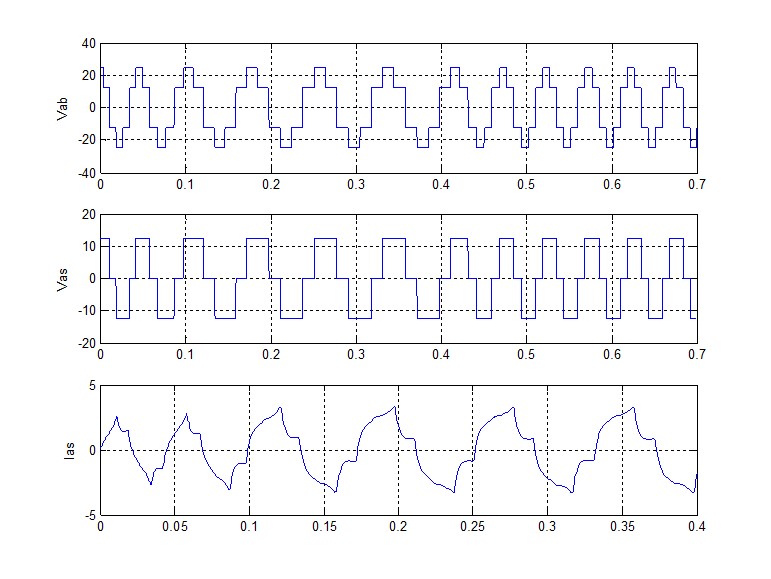
ابتدا به عملکرد موتور dc بی جاروبک با ولتاژ استاتور اعمالی سه فاز متعادل با فرکانس متناظر با سرعت روتور می پردازیم .
دیگر توضیحاتی که در متن به آن اشاره شده:
- معادله های ولتاژ وگشتاور در متغیرهای ماشین
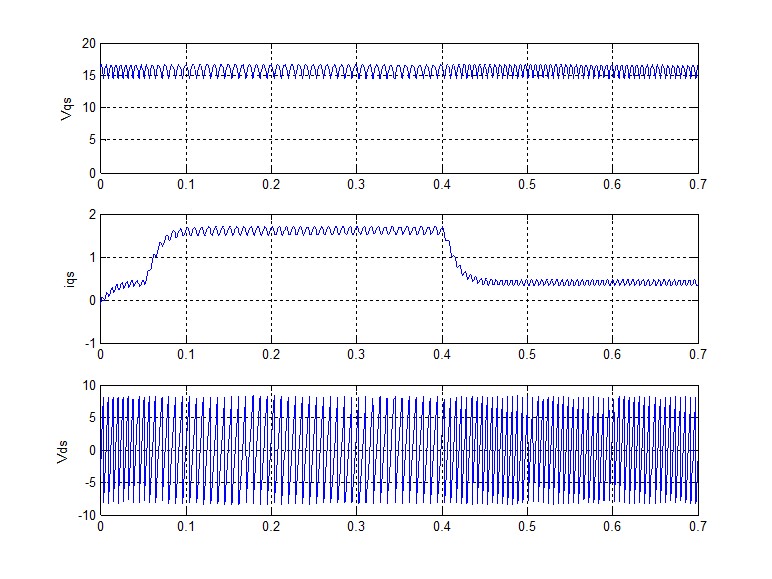
- معادله های ولتاژ و گشتاور در متغیرهای دستگاه مرجع روتور
- تحلیل عملکرد حالت دائمی
- مد عملکرد مشترک
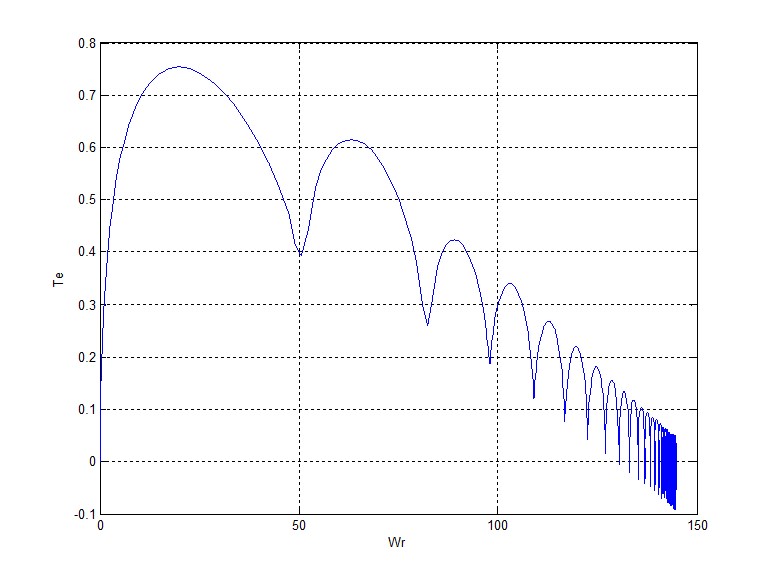
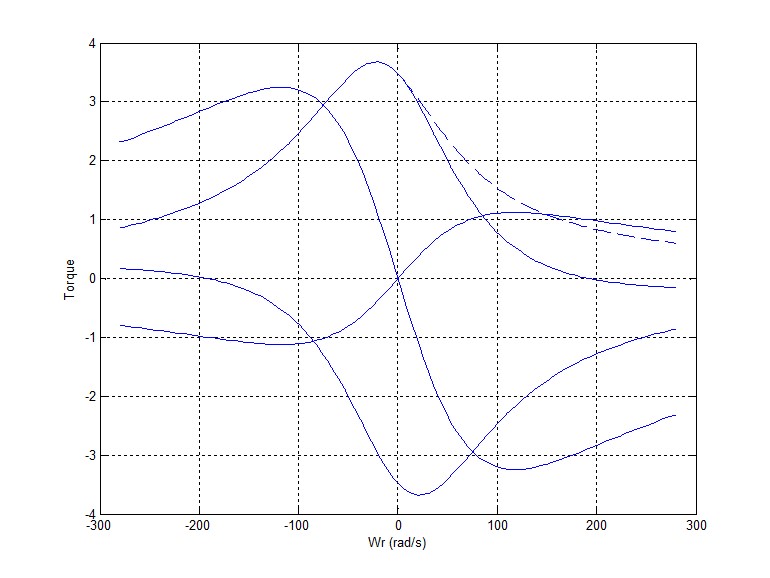
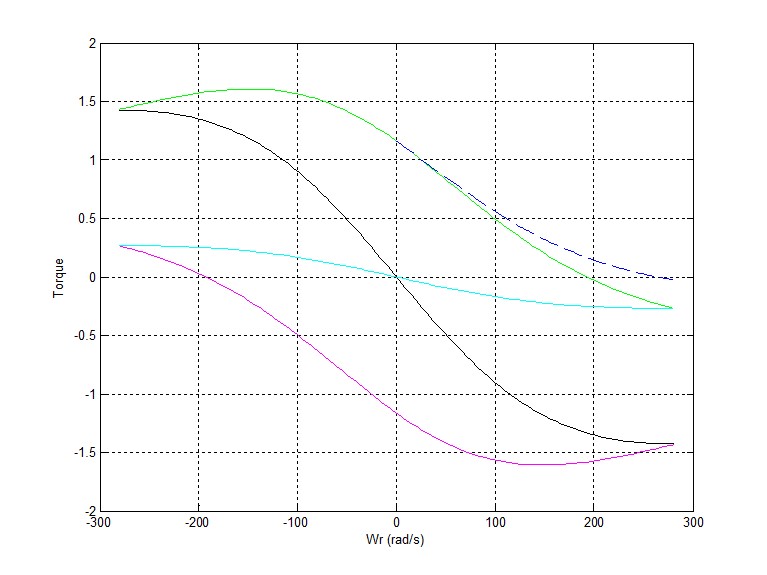
- مشخصه گشتاور – سرعت یک موتور dc بی جاروبک در حالت های متفاوت ورودی های اولیه
- مشخصه شتابگیری بدون بار یک موتور dc بی جاروبک
- مشخصه گشتاور – سرعت برای شتابگیری بدون بار یک موتور dc بی جاروبک
- مشخصه شتابگیری بدون بار یک موتور dc بی جاروبک با ممان اینرسی ۵ برابر
- مشخصه گشتاور – سرعت برای شتابگیری بدون بار یک موتور dc بی جاروبک با ممان اینرسی ۵ برابر
- عملکرد دینامیکی یک موتور dc بی جاروبک طی تغییرات پله ای در گشتاور بار ممان اینرسی کل دو برابر ممان اینرسی روتور است
- مشخصه های شتابگیری بدون بار یک موتور dc بی جاروبک که از یک اینورتر جریان پیوسته شش پالسه تغذیه می شود . ممان اینرسی کل پنج برابر ممان اینرسی روتور است .
- مشخصه های گشتاور – سرعت برای شتابگیری بدون بار یک موتور dc بی جاروبک که از یک اینورتر جریان پیوسته شش پالسه تغذیه می شود
- مشخصه های گشتاور – سرعت برای شتابگیری بدون بار یک موتور dc بی جاروبک که از یک اینورتر جریان ناپیوسته شش پالسه تغذیه می شود
- بررسی هارمونیک های حالت دائمی
- مقدار گشتاور هارمونیک ششم با اینورتر جریان پیوسته شش پالسه
- مقدار گشتاور هارمونیک ششم با اینورتر جریان پیوسته شش پالسه با افزایش Ls با ضریب ۳
برخی نتایج:
روی عکس ها کلیک کنید تا با وضوح بیشتری ببینید



در صورت سوال در مورد محصول و یا در صورت اشکال در اجرای شبیه سازی می توانید از بخش تماس با ما (منوی بالا)، با شماره تلفن مورد نظر مکاتبه نمایید.
مجموعه: ماشین های الکتریکی