
شبیه سازی: هدایت وسیله برای اجتناب از خوردن به موانع (مساله بهینه سازی) در متلب
پروژه ۱۰۳۷: شبیه سازی ام فایل در متلب + سورس کامل متلب + توضیحات شبیه سازی
خلاصه ای از کار:
در این شبیه سازی قصد داریم تا کنترل یک وسیله نقلیه را توسط نرم افزار متلب انجام دهیم. هدف بر این بوده وسیله نقلیه طوری کنترل گردد تا به موانع برخورد نکند. مدل ها و ساختارهای متفاوتی در این شبیه سازی به کار رفته تا وسیله نقلیه به موانع برخورد نکند. در این شبیه سازی یکسری نقاط به عنوان موانع در نظر گرفته شده. در ابتدا وسیله نقلیه از یک مکان شروع به حرکت کرده و در بین مسیر باید طوری از موانع عبور کند که هیچ برخوردی اتفاق نیافتد. در شبیه سازی مربع نقطه اولیه ، ستاره مقصد و موانع با دایره های تو خالی نشان داده شده است.
برخی از موارد که در متن آمده:
- درمورد محل موانع (قطب ها)، اطلاعات کاملی داشته باشید.
- وسیله ،موقعیت (GPS) و موقعیت هدف خود را می شناسد.
- مشکل هدایت خودکار وسیله
- ما الگوی کاملی از محیط اطرافمان داریم اما از همه محیط اطرافمان نداریم.
- طرح ریزی-ما به فرمول بندی مساله یافتن مسیر به عنوان مساله بهینه سازی نیاز داریم.
- مساله یک تابع بهینه سازی چند هدفه می باشد.
از کنترل بازخورد برای هدایت استفاده می شود: موقعیت موجود درک می شود و این دستور برای حرکت وسیله به موقعیت جدید انجام می شود.این وسیله ممکن نیست به جایی بالاتری موقعیت دستور داده شده برود.اما در فاصله زمانی بعد ما موقعیت وسیله را درک می کنیم و بر اساس ان نقطه تنظیماتی را انجام می دهیم.
برخی از نتایج:

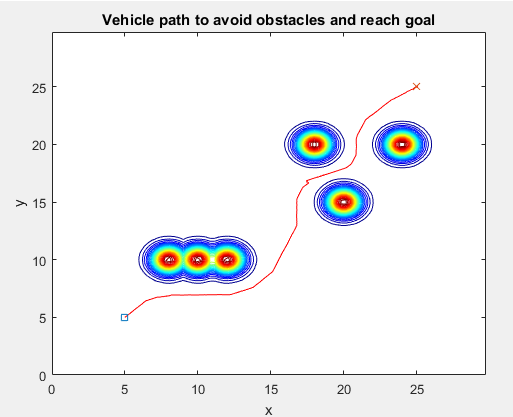






در تصویر آخر، مربع پایین موقعیت اولیه بوده، نقطه ستاره مقصد می باشد و دایره ها موانع می باشند.
در صورت سوال در مورد محصول و یا در صورت اشکال در اجرای شبیه سازی می توانید از بخش تماس با ما (منوی بالا)، با شماره تلفن مورد نظر مکاتبه نمایید.