طراحی کنترل کننده برای سرو موتور با استفاده از روش زیگلر- نیکولز
پروژه ۲۰۵: شبیه سازی رایگان در متلب
تهینه کننده: داود شقاقی
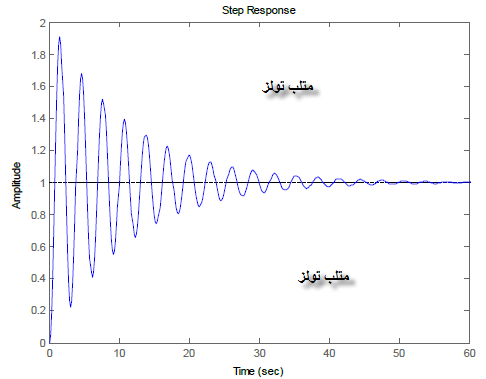
در این مقاله، سعی بر آن است که یک کنترل کننده کلاسیک برای تابع تبدیل سرو موتور طراحی شود. ابتدا این کار با استفاده از روش زیگلر – نیکولز انجام می شود، مشاهده می شود که پاسخ مطلوبی بدست نمی آید،بنابراین با انتقال سیستم و تابع تبدیل به محیط sisotool سعی داریم که پاسخ را مطلوب و ضرایب را بهینه سازیم .یک تابع تبدیل معمول برای servo motor ها به صورت زیر است :
سایت متلب تولز را به خاطر داشته باشید. اگر چنانچه فایل نیاز به پسوورد داشت عبارت matlabtools.com را وارد نمایید.
در صورت سوال در مورد محصول می توانید از بخش تماس با ما (منوی بالا)، با شماره تلفن مورد نظر مکاتبه نمایید.
برای عضویت روی عکس زیر کلیک کنید : (آخرین اخبار مرتبط با مهندسی و سایر تکنولوژی ها)

یا آدرس لینک زیر را در تلگرام خود جستجو نمایید:
m_b_coll@
مجموعه: کنترل, ماشین های الکتریکی