استفاده از شبکه عصبی پرسپترون چند لایه برای فرمان کشتی تانکر
پروژه ۶۲۱: شبیه سازی ام فایل در متلب + سورس کامل متلب + توضیحات شبیه سازی
خلاصه ای از کار:
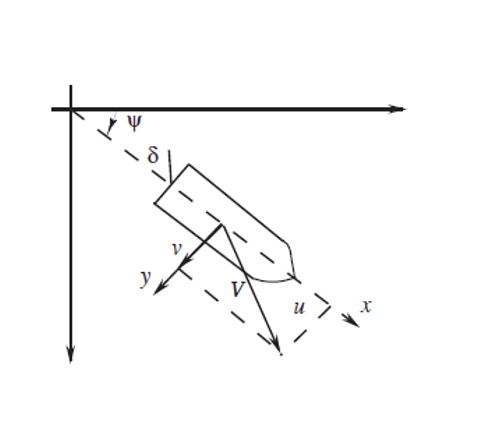
در این سیستم، کشتی تانکر در جهت محور x با سرعت نامی u حرکت می کند.
Ψ زاویه نسبت به محور افق در واحد رادیان
δ ورودی فرمان در واحد رادیان
Ψr زاویه مطلوب به رادیان
هدف از این شبیه سازی :
Ψ جهت Ψr را ردیابی کند.
عملگر فرمان بصورت زیر :
سرعت مسیر (سکان هواپیما کمتر موثر بوده در سرعت های پایین تر)
وزن کشتی در شرایط مختلف متفاوت بوده (و کشتی سنگین آهسته تر حرکت می کند)
باد به سمت تانکر می وزد و این می تواند متاثر باشد از چندین تنظیم.
سنسور می تواند شامل برخی از سرو صدا و نویز باشد
سکان فقط می تواند بین +و منفی ۸۰ درجه حرکت کند.
مدل غیر خطی:
این مدل می تواند وزن کشتی را از بالاترین مقدار به پایین ترین مقدار تغییر دهد و همچنین می تواند تغییر دهد سرعت را با اضافه کردن تاثیر باد و سنسورهای نویز .
مسائل شبیه سازی :
- استفاده از روش رانگ کوتا
شبیه سازی یک کنترل کننده دیجیتال که آبدیت می کند هر ۱۰ ثانیه ، جاییکه سایز پله های انتگرال گیری ۱ ثانیه است(شبیه سازی یک سیستم آنالوک/دیجیتال)
- ساختار کلی این شبیه سازی :

همانطور که دیده می شود قصد داریم تا با استفاده از یک شبکه عصبی چند لایه این کشتی تانکر رو کنترل نماییم.
انتخاب نوع و ساختار شبکه برای لایه ها :
برخی نتایج:


در صورت سوال در مورد محصول و یا در صورت اشکال در اجرای شبیه سازی می توانید از بخش تماس با ما (منوی بالا)، با شماره تلفن مورد نظر مکاتبه نمایید.
دیگر پروژه های قابل دانلود: